Table of contents
Solve the static linear elasticity PDE using linear triangle elements and an external traction force.
Let , , use plane stress and implement a solver to numerically find the displacement field and compute the stress field.
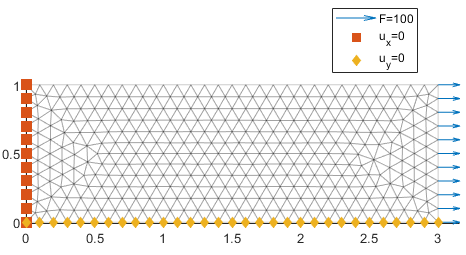
Create a simple geometry that is verifiable by hand. In this case we will create a rectangle on which we can apply the load case shown in the figure above. We want to apply boundary conditions such that the rectangle is in pure tension, meaning we only have stress in the x-direction. All other stress i zero. Thus we can compute the displacement analytically:
where and .
This assumes you have access to the PDE toolbox in matlab. Check this by running ver. Otherwise you need to install that toolbox.
clear
model = createpde;
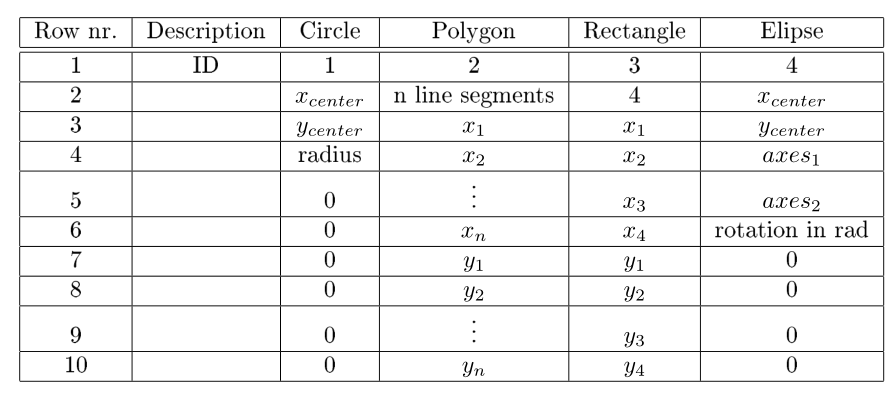
R1 = [3,4,0,3,3,0,0,0,1,1]'; %Create a rectangle
gd = [R1];
sf = 'R1'; % What boolean operation are we running?
ns = char('R1')'; % Label the geometric entities, so we know which is which.
g = decsg(gd,sf,ns);
geometryFromEdges(model,g);
figure
pdegplot(model,'EdgeLabels','on')
title('Imported geometry with regions')
Weak form: Find the displacement field , with on the boundary , such that
We have (using the Mandel notation), the element stiffness matrix
the element load vector (zero in our problem)
the traction (external force) vector
where denotes edge (in 2D, where as in 3D it would be a surface). The edge element is one spatial dimension lower, we are formulating the equations on an edge instead of a triangle. For the edge element we have
Tasks:
Create mesh
Compute the stiffness matrix
Compute the traction load
Solve the linear system
Compare displacement error
Compute the stress
% Start with the mesh
h = 5 %mmh = 5mesh = generateMesh(model, 'Hmax', h, 'Hmin', h/2,...
'hgrad',1.99, 'GeometricOrder', 'linear');
% pdemesh(mesh)
P = mesh.Nodes';
nodes = mesh.Elements';
% Visualize the mesh
figure; hold on
patch('Vertices', P, 'Faces', nodes,'FaceColor', 'c', ...
'EdgeAlpha',0.3)
axis equal tight
plot(P(:,1),P(:,2),'ok','MarkerFaceColor','k','MarkerSize',10)
text(P(:,1)-0.03,P(:,2),cellstr(num2str([1:size(P,1)]')), ...
'Color','w','FontSize',6)
for iel = 1:size(nodes,1)
inod = nodes(iel,:);
xm = mean(P(inod,1));
ym = mean(P(inod,2));
text(xm,ym,num2str(iel),'FontSize',6)
end
[nele, knod] = size(nodes);
[nnod, dof] = size(P);
neq = nnod*dof;
phi = @(xi,eta)[1-xi-eta, xi, eta];
Bh = [-1,1,0
-1,0,1];E = 2200; %MPa
nu = 0.33;
t = 1; %mm
%Plane Stress
lambda = E*nu/(1-nu^2);
mu = E/(2*(1+nu));% Pre-allocate
S = zeros(neq,neq);
sq = 1/sqrt(2);
for iel = 1:nele
inod = nodes(iel,:);
iP = P(inod,:);
locdof = zeros(1,6);
locdof(1:2:end) = inod*2-1;
locdof(2:2:end) = inod*2;
J = Bh*iP;
area = det(J) * 1/2;
B = J\Bh;
Beps = zeros(3,6);
Beps(1,1:2:end) = B(1,:);
Beps(2,2:2:end) = B(2,:);
Beps(3,1:2:end) = sq*B(2,:);
Beps(3,2:2:end) = sq*B(1,:);
Bdiv = zeros(1,6);
Bdiv(1:2:end) = B(1,:);
Bdiv(2:2:end) = B(2,:);
Se = t*(2*mu*Beps'*Beps + lambda*Bdiv'*Bdiv)*area;
S(locdof, locdof) = S(locdof, locdof) + Se;
end
% figure
% spy(S)%Region
E2 = findNodes(mesh,'region','Edge',2);
%load
fload = [100,0]';
phi=@(xi)[1-xi,xi];
eleInds = find(sum(ismember(nodes,E2),2)>1);
F = zeros(neq,1);
ieqs = zeros(2*2,1);
PHI = zeros(2,4);
L = 0;
nele = length(eleInds);
for iel = 1:nele
indTri = eleInds(iel);
iTri = nodes(indTri,:);
iEdgeNodes = iTri(ismember(iTri,E2));
ieqs(1:2:end) = 2*iEdgeNodes-1; %x-dofs
ieqs(2:2:end) = 2*iEdgeNodes-0; %y-dofs
xc = P(iEdgeNodes,:);
h = norm(xc(end,:)-xc(1,:));
L = L + h;
xi = 0.5; iw = 1;
PHI(1,1:2:end) = phi(xi);
PHI(2,2:2:end) = phi(xi);
fe = PHI'*fload(:)*t*h*iw;
F(ieqs) = F(ieqs) + fe;
end
F = F/(L*t);Verify the traction load
sum(F(1:2:end))ans = 100Visualize the load vector
figure; hold on
patch('Vertices', P, 'Faces', nodes,'FaceColor', 'c', ...
'EdgeAlpha',0.1,'DisplayName','linear mesh')
axis equal tight
quiver(P(E2,1), P(E2,2), F(E2*2-1), F(E2*2-0),'b', ...
'DisplayName','F=[100,0]N');u = zeros(neq,1);Edge 1
E1 = findNodes(mesh,'region','Edge',1);
% Prescribe displacements
u(E1*2) = 0; %y-displacements
plot(P(E1,1),P(E1,2),'bd','MarkerFaceColor','b','Displayname','u_y=0')Edge 4
E4 = findNodes(mesh,'region','Edge',4);
% prescribed displacement
u(E4*2-1) = 0; %x-displacements
plot(P(E4,1),P(E4,2),'rs','MarkerFaceColor','r','Displayname','u_x=0')
hl = legend('show');
set(hl,'Position',[0.60 0.69 0.20 0.20]);
Modify the right-hand side
presc = unique([E4*2-1, E1*2]);
free = setdiff(1:neq,presc);
F = F - - S(:,presc)*u(presc);Solve the linear system
u(free) = S(free,free)\F(free);Visualize the displacement field
U = [u(1:2:end), u(2:2:end)];
UR = sum(U.^2,2).^0.5;
scale = 3;
figure; hold on
pdegplot(model,'EdgeLabels','off')
patch('Vertices', P+U*scale, 'Faces', nodes,'FaceColor', 'interp', ...
'EdgeAlpha',0.1,'CData',UR)
axis equal tight
title(['Displacement field, scale: ',num2str(scale)])
Verification
A=1*t; L = 3; f = 100;
deltax = f*L/(E*A)deltax = 0.1364deltay = -nu*(deltax/L)*1deltay = -0.0150ux = U(E2,1)ux = 2x1
0.1364
0.1364uy = U(findNodes(mesh,'region','Edge',3),2)uy = 2x1
-0.0150
-0.0150